Роботы научились работать с предметами любой формы
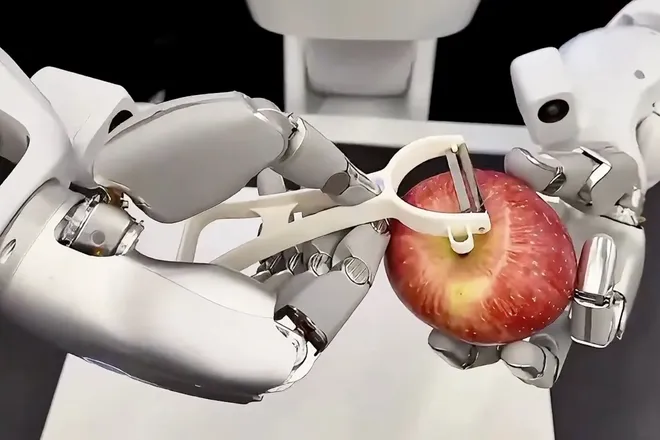
Роботы часто легко справляются с объектами правильной формы, например, с коробками, но испытывают трудности, если предмет имеет сложную или неправильную геометрию — как, например, яблоко или банан. Однако теперь эта проблема может быть решена, пишет Tech Xplore.
Специалисты из Швейцарского федерального технологического института в Лозанне (EPFL) и института Idiap разработали новый подход, позволяющий роботам надежно манипулировать объектами любой формы. Суть метода — обучение роботов учитывать уникальную геометрию каждого предмета, с которым они сталкиваются.
Для человека такие задачи, как чистка картофеля или мытье посуды, не представляют труда. Для роботов же это вызов: объекты вроде чашек, фруктов или инструментов различаются по форме, размеру и кривизне поверхности. Традиционные алгоритмы позволяют работать только с ограниченным набором форм, а обобщение на множество неправильных объектов до сих пор оставалось сложной задачей.
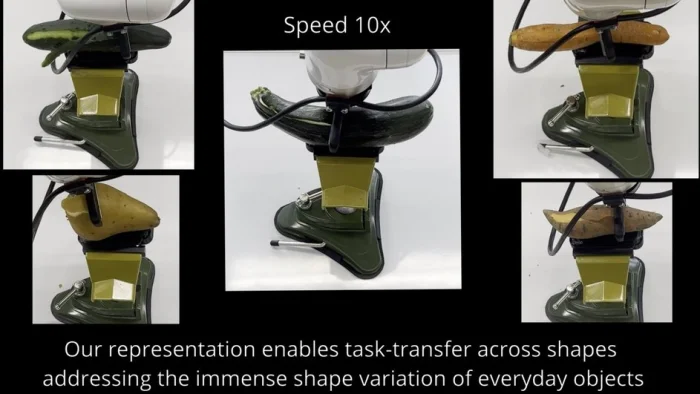
Новая система, предложенная учеными, основана на геометрическом подходе. Робот с помощью стереокамеры строит трехмерную карту объекта, после чего формирует облако координат, служащее ориентиром для манипулятора. Благодаря этому машина может определять, как двигаться по поверхности любого предмета. Важное преимущество — возможность переноса навыков: освоив задачу на одном объекте, робот может применить тот же навык к совершенно другой форме без повторного обучения.
В ходе испытаний робот успешно выполнял очистку, нарезку и чистку различных объектов, даже если ранее их не видел и данные с камеры были неполными. Математическая обработка информации делает систему устойчивой к ошибкам и шумам в данных. «Благодаря использованию облака точек и ключевых точек целевого объекта мы разработали вычислительно эффективный и надежный метод для вычисления локальных систем координат в реальном времени», — отмечают авторы исследования.
Тем не менее система пока требует ручной разметки ключевых точек на объекте. В будущем ученые планируют автоматизировать этот этап и испытать технологию на мягких, деформирующихся предметах — например, на губках.
Ранее Hi-Tech Mail рассказал, как Toyota превратила автомобильные кресла в компьютерные.












